Notre production finale
Page 1 sur 1

Notre production finale
Admin Ven 20 Nov - 10:47
Nous allons tenter de simuler des mouvements et plus exactement les articulations grâce a des servomoteurs.
Mais qu'est ce qu'un servomoteurs? :
On le commande par l'intermédiaire d'un câble électrique à trois fils qui permettent d’alimenter le moteur et de lui transmettre des ordres de positions sous forme d’un signal électrique. C’est la durée des impulsions qui détermine l’angle de rotation de l'axe et de la position du bras de commande du servomoteurs. Afin de conserver la position, le signal est répété périodiquement, par exemple toutes les 20 ms.

vous avez ci-dessus un exemple de servomoteurs que nous utilisons.

(http://louispayen.apinc.org/2002-2003/ressources-tpe.htm)
¤La première approche est de faire une analyse fonctionnelle, puis de partir sur la partie programmation afin de pouvoir enfin tout assembler.
¤Après fait l'analyse fonctionnelle que l'on peut trouver ici:
et d'avoir fait notre travail de programmation (vous pourrez ici une image du programme très bientôt ) :
¤Nous avons assemblé toute les pièces de notre projet (faisant en ce moment l'objet de finalisation et de dernière vérifications la vidéo de son utilisation sera posté très prochainement :ici )
Mais qu'est ce qu'un servomoteurs? :
Définition :
¤Un servomoteur est un moteur utilisé pour a l'inverse d'un moteur ordinaire est utilisé pour obtenir une position, il peut généralement tourner selon un angle de 120°.On le commande par l'intermédiaire d'un câble électrique à trois fils qui permettent d’alimenter le moteur et de lui transmettre des ordres de positions sous forme d’un signal électrique. C’est la durée des impulsions qui détermine l’angle de rotation de l'axe et de la position du bras de commande du servomoteurs. Afin de conserver la position, le signal est répété périodiquement, par exemple toutes les 20 ms.
vous avez ci-dessus un exemple de servomoteurs que nous utilisons.
concrètement comment marche un servomoteur ?
(http://louispayen.apinc.org/2002-2003/ressources-tpe.htm)
Le déroulement de notre projet finale :
¤La première approche est de faire une analyse fonctionnelle, puis de partir sur la partie programmation afin de pouvoir enfin tout assembler.
¤Après fait l'analyse fonctionnelle que l'on peut trouver ici:
et d'avoir fait notre travail de programmation (vous pourrez ici une image du programme très bientôt ) :
¤Nous avons assemblé toute les pièces de notre projet (faisant en ce moment l'objet de finalisation et de dernière vérifications la vidéo de son utilisation sera posté très prochainement :ici )
La programmation de notre servomoteur:
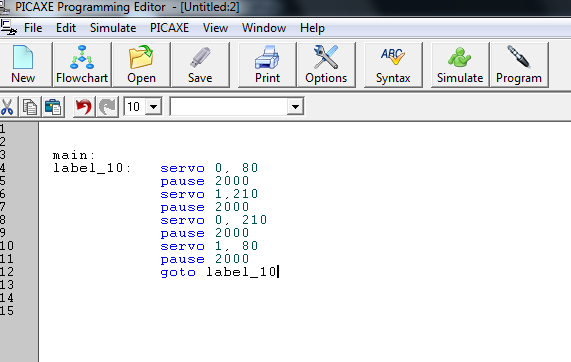
ici nous avons utiliser des valeurs extrêmes pour bien montrer la rotation des servomoteurs
Admin- Admin
- Messages : 17
Date d'inscription : 13/11/2009 -

Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum|
|
|